SNARF Working Group - Report of the First SNARF Workshop
Evolving from NAD 83 to SNARF
Richard Snay
February 4, 2004
The development of a stable North American reference frame (SNARF) should influence future positioning activities on our continent not only for scientists; but also for land surveyors, GIS professionals, remote sensing professionals, and others. Although our current spatial reference system–the North American Datum of 1983 (NAD 83)--may seem sufficiently adequate for most positioning activities in North America, history has revealed that reference systems need to evolve to keep pace with the ever-increasing accuracy with which we are able to locate points on and near the Earth. These accuracy improvements are driven by advances in geodetic technology and geophysical theory. Indeed, the development of electronic-distance-measurement (EDM) instrumentation in the 1960s and satellite-based doppler positioning in the 1970s compelled the North American positioning community to supercede the North American Datum of 1927 (NAD 27) with NAD 83 in the mid-1980s. In particular, the EDM and doppler observations revealed that NAD 27 positional coordinates contained regional distortions exceeding several meters. The doppler observations also revealed that the NAD 27 origin was more than 100 km from the Earth’s center of mass. NAD 83 was introduced to correct these NAD 27 shortcomings. No sooner was NAD 83 adopted, then newer geodetic technologies (GPS, VLBI, SLR) and newer geophysical theories (plate tectonics and glacial isostatic adjustment (GIA)) came along to expose some of its shortcomings. Here we examine the status of NAD 83 to consider how we may develop a better reference system for North America.
NAD 83 is the “legal” spatial reference system in the United States, Canada, Greenland and several Caribbean and Central American countries. (In Mexico,the International Terrestrial Reference System (ITRS) is the legal reference system.) NOAA’s National Geodetic Survey is responsible for maintaining NAD 83 for the United States and its territories. NGS representatives collaborate with representatives from several countries to ensure that the U.S. realization of NAD 83 is consistent with those of other countries.
The NAD 83 origin and the orientation of the NAD 83 coordinate axes were essentially realized via doppler observations in the mid-1980s. VLBI and SLR observations have since revealed that the NAD 83 origin differs from the ITRF96 origin by about 2.2 m. VLBI and SLR observations have also revealed that the coordinate axes of NAD 83 are not parallel to the coordinate axes of ITRF96 and that the original NAD 83 scale differs from the ITRF96 scale by about 0.6 parts-per-million. In addition, GPS observations mandated that NAD 83 had to be mathematically related to a global reference system that properly accounted for plate motion. (Because GPS has made cm-level positioning easily achievable around the world, ephemerides for GPS satellites need to be expressed with commensurate accuracy in a global reference system. Such accuracy is not possible on a global scale without accounting for plate motion.) Hence in 1998, the United States and Canada jointly replaced the original realization of NAD 83, which had been adopted in 1986, with a newer realization (Craymer et al., 2000). This realization--called NAD 83 (CORS96) in the United States and NAD 83 (CSRS98) in Canada–is defined by a 14-parameter Helmert transformation from ITRF96, denoted ITRF96 –> NAD 83. While this transformation maintained the original location of the NAD 83 origin and the original orientation of the NAD 83 axes relative to their ITRF96 counterparts (at the 1997.00 epoch), it revised the scale of NAD 83 and it recognized that the orientation of the NAD 83 axes had to rotate relative to the ITRF96 axes at a constant rate with respect to time. In particular, the ITRF96 –> NAD 83 transformation was defined so that (1) the new NAD 83 scale equals the ITRF96 scale (at the 1997.00 epoch), (2) the new NAD 83 scale does not change with respect to the ITRF96 scale over time, (3) the new NAD 83 origin does not move relative to the ITRF96 origin, and (4) the new NAD 83 axes rotate relative to the ITRF96 axes at rates equivalent to the values for the NUVEL1A-NNR parameters for the North American tectonic plate. This mathematical relationship between NAD 83 and ITRF96 has since been extended to ITRF97 and ITRF00 by using pertinent transformations adopted by the International Earth Rotation Service and the International GPS Service. In particular, the transformation from ITRF00 to NAD 83 equals the composite of three separate transformations as may be represented by the notation:
ITRF00 –> ITFR97 –> ITRF96 –> NAD 83.
See Soler and Snay (2004) for details.
Because the scale of ITRF96 differs from that of ITRF00, (1) the scale of NAD 83 differs from that of ITRF00. For similar reasons, (2) the scale of NAD 83 changes linearly in time with respect to the scale of ITRF00, (3) the NAD 83 origin moves relative to the ITRF00 origin, and (4) the NAD 83 coordinate axes rotate relative to the ITRF00 coordinate axes at a rate that differs from the values for the NUVEL1A-NNR parameters for the North American plate. In summary, NAD 83 has many shortcomings--those cited in this paragraph as well as the non-geocentricity of NAD 83. These shortcomings, however, are acceptable because NAD 83 can better serve its role as the legal reference system for North America by not changing positional coordinates for its reference stations too frequently. These shortcomings are also acceptable as long as the progression of new “scientific” reference frames can be mathematically related to NAD 83 by Helmert transformations.
Vertical Coordinates
The original NAD 83 realization that was adopted in 1986 was essentially 2D. Coordinates for most of the 250,000 U.S. reference stations that defined this reference frame were derived from triangulation and/or trilateration observations only, and hence these stations did not have accurate NAD 83 vertical coordinates. Thanks to GPS, more than 60,000 U.S. reference stations now have accurate vertical NAD 83 coordinates. Consequently, NAD 83 has effectively become a 3D reference system. A separate vertical reference system, called the North American Vertical Datum of 1988 (NAVD 88), is still maintained for North America. Up until recently, NAVD 88 had been realized via leveling observations. NGS is currently managing the “Height Modernization” program to promote the use of GPS for vertical positioning. Leveling is very expensive and labor intensive, whereas GPS is relatively inexpensive. GPS, however, is not as accurate as leveling over short distances. Hybrid geoid models have been created to transform NAD 83 ellipsoidal heights to NAVD 88 orthometric heights. The latest such model is called GEOID03. Many people prefer using orthometric heights as opposed to ellipsoid heights because orthometric heights relate to how water will flow.
Because of vertical crustal motion (tectonic, seismic, fluid withdrawal, sediment compaction, crustal loading/unloading, glacial isostatic adjustment (GIA), erosion, hydrological effects, etc.), a spatially coherent vertical reference frame is essentially non-existent in some locations (California, Louisiana, Alaska) or it is of questionable quality in other locations (Great Lakes, Gulf Coast, Atlantic Coast, Pacific Northwest, Houston). Accurate vertical crustal motion models need to be developed to maintain a spatially coherent vertical reference system for North America. Relatively few repeat leveling surveys have been performed to measure vertical crustal motion because of the cost of these surveys. GPS provides an economical alternative for measuring vertical crustal motion. GPS, however, is not as accurate in the vertical as it is in the horizontal.
CORS Network
The CORS (Continuously Operating Reference Station) network (Snay et al., 2002) is the foundation of the National Spatial Reference System in the United States. Each CORS includes a permanently installed dual-frequency GPS receiver that collects data continuously. These data are freely available to the public via the Internet (http://www.ngs.noaa.gov/CORS/). Currently, there are more than 800 CORS located in the United States, and this network is growing by about 100 stations per year. Stations are operated by more than 110 organizations including various federal, state, and local governments; as well as by academic and commercial organizations. NGS computes both ITRF00 and NAD 83 positional coordinates and velocities for stations in the CORS network. These coordinates are validated on an annual basis via a solution involving several years of CORS data. The current solution involves data for the 1994-2002 interval.
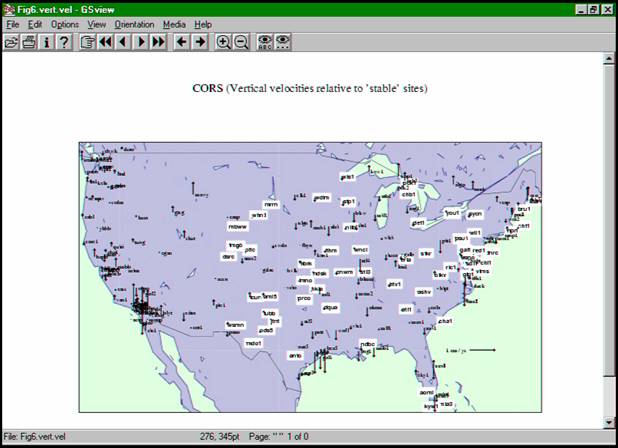
NGS recently performed an experiment to define a stable North American reference frame; namely, we found a 7-parameter velocity transformation from the reference frame for our current CORS solution to a new reference frame such that this transformation maximized the number of stations in North America whose horizontal velocities are less than 1 mm/yr in magnitude and whose vertical velocities are less than 2 mm/yr in magnitude (Figure 1).
HTDP Software
NGS has developed the HTDP (Horizontal Time-Dependent Positioning) software (Snay, 1999) that enables its users to predict horizontal NAD 83 velocities and displacements for locations anywhere in the United States and to update/backdate horizontal NAD 83 positional coordinates from one time to another. Users can also apply HTDP to update/backdate certain types of geodetic observations (interstation GPS vectors, distances, azimuths, horizontal angles) from one time to another. HTDP can also be used to transform positional coordinates and/or velocities from one reference frame to another for several realizations of NAD 83, ITRS, and the World Geodetic System of 1984 (WGS 84). The HTDP software is upgraded about once per year. NGS is seeking to incorporate a GIA model into the HTDP software whereupon the software would be renamed as TDP (Time Dependent Positioning).
References
Craymer, M., Ferland, R., and Snay, R. (2000) Realization and unification of NAD 83 in Canada and the U.S. via the ITRF. In: R. Rummel, H. Drewes, W. Bosch, H. Hornik, eds., Towards an Integrated Global Geodetic Observing System (IGGOS), IAG Section II Symposium, Munich, October 5-9, 1998. International Association of Geodesy Symposia, Volume 120, 118-121, Springer-Verlag, Berlin.
Soler, T. and Snay, R.A. (2004) Transforming positions and velocities between ITRF00 and NAD 83. Journal of Surveying Engineering (in press).
Snay, R.A. (1999) Using the HTDP software to transform spatial coordinates across time and between reference frames. Surveying and Land Information Systems, 59(1), 15-25.
Snay, R.A., Adams, G., Chin, M., Frakes, S., Soler, T., and Weston, N.D. (2002) The synergistic CORS program continues to evolve. Proc., ION GPS 2002 (CD-ROM), Institute of Navigation, Alexandria, VA, 2630-2639.
|
|
Last modified: 2019-12-24 02:12:54 America/Denver